



Назорати набзи 2 Давраи пӯшидаи Stepper Drive T60Plus


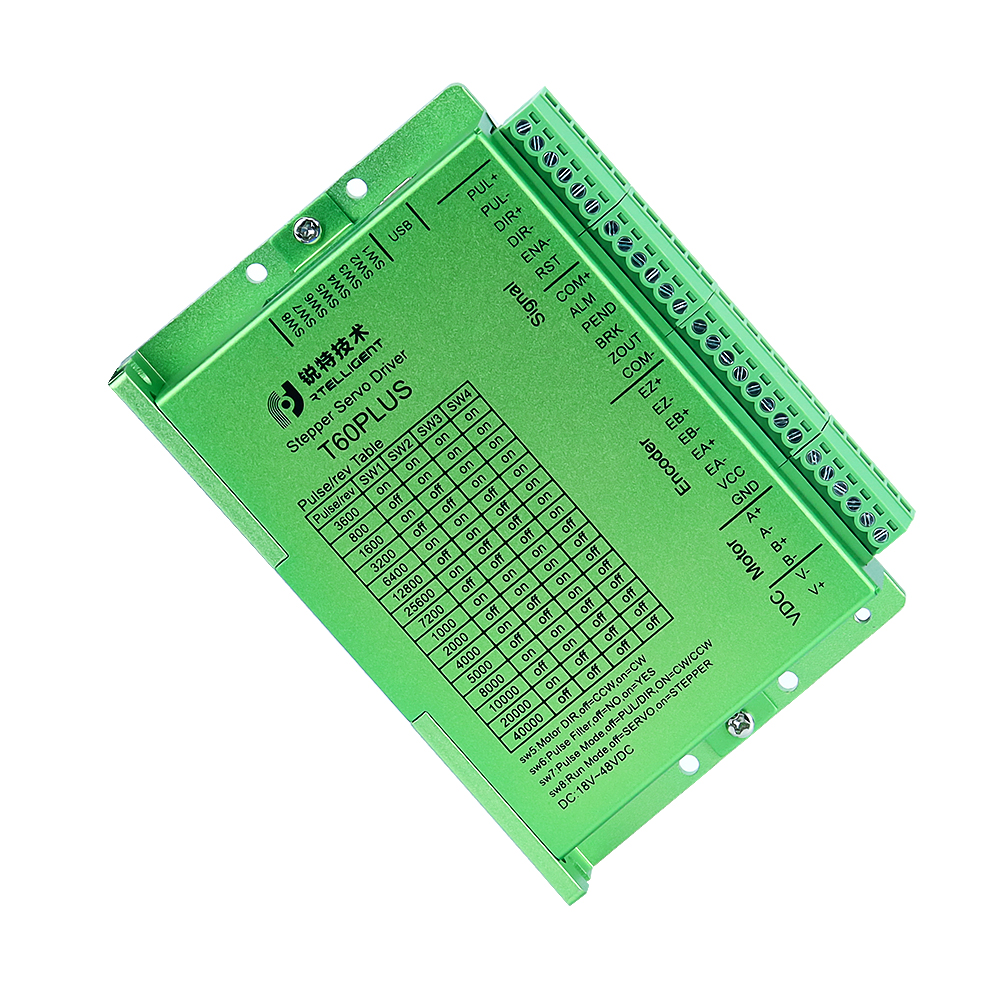
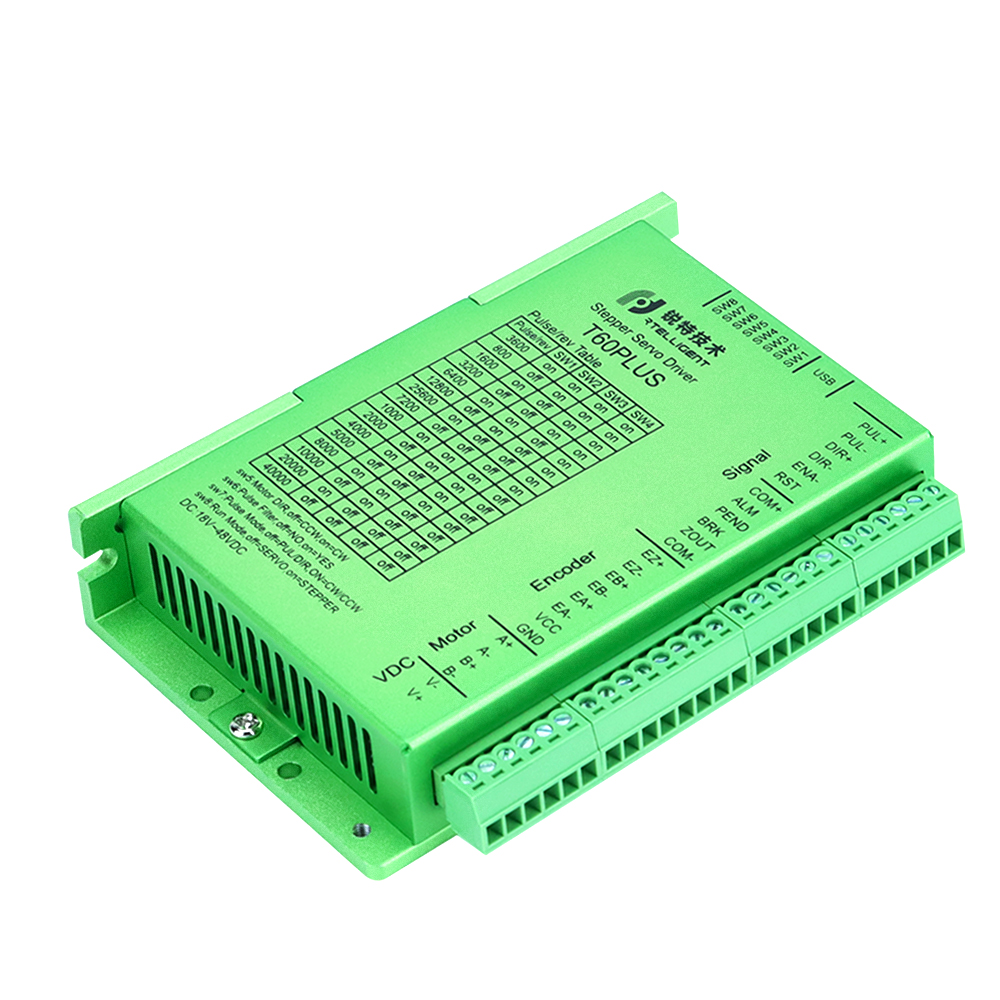
Муқаддимаи маҳсулот



Пайвастшавӣ

Вижагиҳо
| Таъмини нерӯ | 18 ~ 48VDC |
| Назорати дақиқ | 4000 Набз/р |
| Ҳолати набз | Самт ва набз, набзи дукаратаи CW/CCW, набзи чорчӯбаи A/B |
| Назорати ҷорӣ | Алгоритми идоракунии вектори Servo |
| Танзимоти зербахш | Танзими гузариши DIP, 15 вариант (ё танзимоти нармафзори ислоҳӣ) |
| Диапазони суръат | Анъанавӣ 1200 ~ 1500 rpm, то 4000 rpm |
| Қатъи резонанс | Ҳисобкунии автоматии нуқтаи резонансӣ барои пахш кардани ларзиши басомади миёна |
| Танзими параметрҳои PID | Нармафзори хатогиҳо барои танзими хусусиятҳои PID мотор |
| Филтри пулс | Филтри сигнали рақамии 2MHz |
| Баромади ҳушдор | Баромади ҳушдор барои ҷараён, аз ҳад зиёд, хатои мавқеъ ва ғайра. |
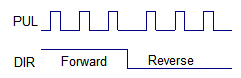
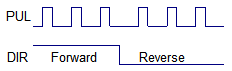
Ҳолати набз
Интерфейси сигнали гардонандаи силсилаи стандартии T шакли импулс аст ва T60PLUS V3.0 метавонад се намуди сигналҳои фармони импулсро қабул кунад.
| Набз ва самт (PUL + DIR) |
|
| Набзи дукарата (CW + CCW) |
|
| Набзи ортогоналӣ (набзи ортогоналӣ A/B) | 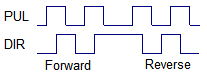 |
Танзимоти қадами хурд
| Набз/рев | SW1 | SW2 | SW3 | SW4 | Мулохизахо |
| 3600 | on | on | on | on | Калиди DIP ба ҳолати "3600" табдил дода мешавад ва нармафзори санҷишӣ метавонад зербахшҳои дигарро озодона иваз кунад. |
| 800 | хомӯш | on | on | on | |
| 1600 | on | хомӯш | on | on | |
| 3200 | хомӯш | хомӯш | on | on | |
| 6400 | on | on | хомӯш | on | |
| 12800 | хомӯш | on | хомӯш | on | |
| 25600 | on | хомӯш | хомӯш | on | |
| 7200 | хомӯш | хомӯш | хомӯш | on | |
| 1000 | on | on | on | хомӯш | |
| 2000 | хомӯш | on | on | хомӯш | |
| 4000 | on | хомӯш | on | хомӯш | |
| 5000 | хомӯш | хомӯш | on | хомӯш | |
| 8000 | on | on | хомӯш | хомӯш | |
| 10000 | хомӯш | on | хомӯш | хомӯш | |
| 20000 | on | хомӯш | хомӯш | хомӯш | |
| 40000 | хомӯш | хомӯш | хомӯш | хомӯш |
Танзимоти қадами хурд
Терминалҳои ронандагӣ сӯхтаанд?
1. Агар байни терминалҳо расиши кӯтоҳ дошта бошад, тафтиш кунед, ки печи муҳаррик ноқилҳои кӯтоҳ аст.
2. Агар муқовимати дохилӣ байни терминалҳо хеле калон бошад, лутфан тафтиш кунед.
3. Агар ба пайвастшавии байни симҳо soldering аз ҳад зиёд илова карда шавад, барои ташаккули тӯби solder.
Драйви қадами пӯшида ҳушдор дорад?
1. Агар хатогии пайвастшавӣ барои ноқилҳои рамзгузор дошта бошад, лутфан боварӣ ҳосил кунед, ки сими тамдиди рамзгузорро дуруст истифода баред ё бо Rtelligent тамос гиред, агар шумо бо сабабҳои дигар сими дарозкуниро истифода набаред.
2.Тафтиш кунед, ки оё рамзгузор вайрон шудааст, ба монанди баромади сигнал.
-
 Дастури корбар Rtelligent T60PLUS V3.0
Дастури корбар Rtelligent T60PLUS V3.0




