



Назорати набзи 2 Давраи пӯшидаи Stepper Drive T86


Муқаддимаи маҳсулот



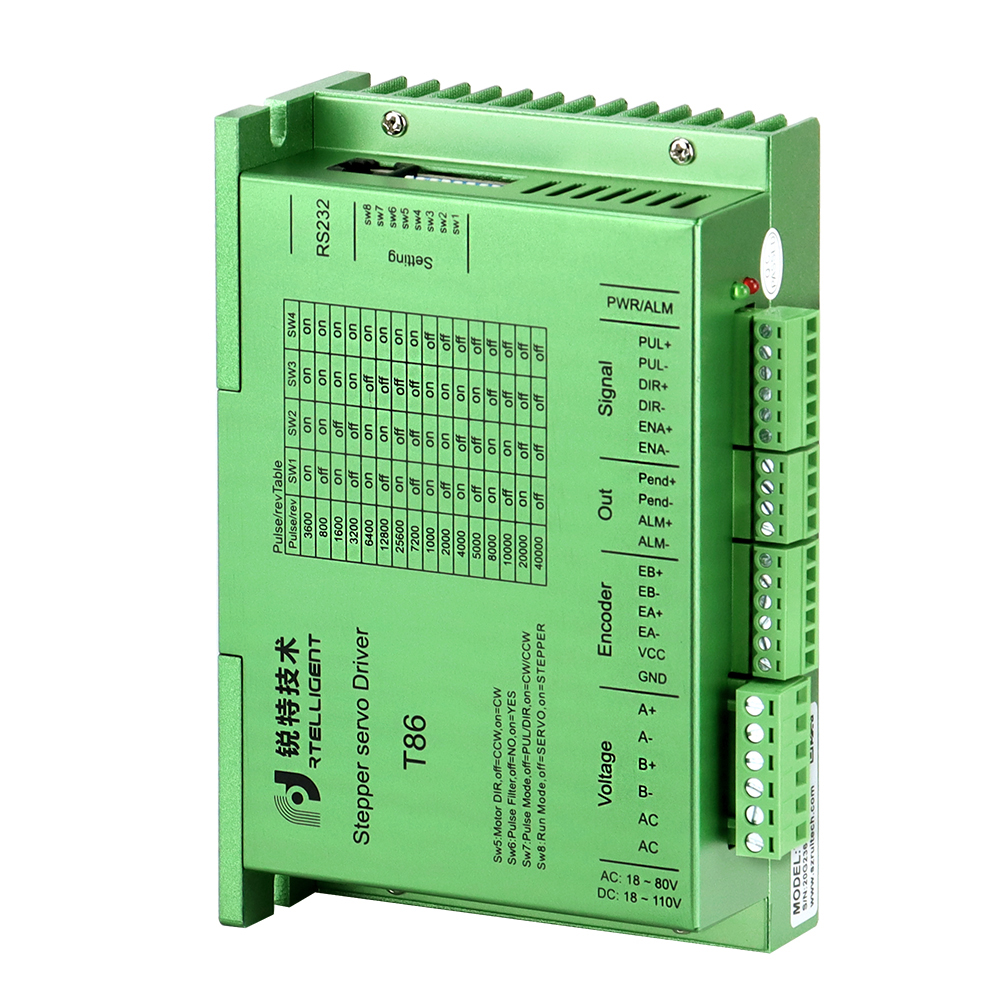
Пайвастшавӣ

Вижагиҳо
| Таъмини нерӯ | 18-80VAC / 18-110VDC |
| Назорати дақиқ | 4000 Набз/р |
| Ҳолати набз | Самт & набзи, набзи дукарата CW / CCW |
| Назорати ҷорӣ | Алгоритми идоракунии вектори Servo |
| Танзимоти қадами хурд | Танзимоти гузариши DIP ё танзимоти нармафзори ислоҳӣ |
| Диапазони суръат | Анъанавӣ 1200 ~ 1500 rpm, то 4000 rpm |
| Қатъи резонанс | Ба таври худкор нуқтаи резонансро ҳисоб кунед ва ларзиши IF-ро боздоред |
| Танзими параметрҳои PID | Санҷиши нармафзор барои танзими хусусиятҳои PID мотор |
| Филтркунии пулс | Филтри сигнали рақамии 2MHz |
| Баромади ҳушдор | Баромади ҳушдор аз ҷараёни аз ҳад зиёд, шиддати аз ҳад зиёд, хатои мавқеъ ва ғайра |
Ҳолати набз
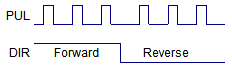
Интерфейси стандартии сигнали ронандаи силсилаи T дар шакли набз аст ва T86 метавонад ду намуди сигналҳои фармони импулсро қабул кунад.
| Набз ва самт (PUL + DIR) |
|
| Набзи дукарата (CW + CCW) | 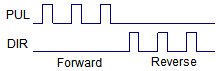 |
Танзимоти қадами хурд
| Набз/рев | SW1 | SW2 | SW3 | SW4 | Мулохизахо |
| 3600 | on | on | on | on | Калиди DIP ба ҳолати "3600" табдил дода мешавад ва нармафзори санҷишӣ метавонад зербахшҳои дигарро озодона иваз кунад. |
| 800 | хомӯш | on | on | on | |
| 1600 | on | хомӯш | on | on | |
| 3200 | хомӯш | хомӯш | on | on | |
| 6400 | on | on | хомӯш | on | |
| 12800 | хомӯш | on | хомӯш | on | |
| 25600 | on | хомӯш | хомӯш | on | |
| 7200 | хомӯш | хомӯш | хомӯш | on | |
| 1000 | on | on | on | хомӯш | |
| 2000 | хомӯш | on | on | хомӯш | |
| 4000 | on | хомӯш | on | хомӯш | |
| 5000 | хомӯш | хомӯш | on | хомӯш | |
| 8000 | on | on | хомӯш | хомӯш | |
| 10000 | хомӯш | on | хомӯш | хомӯш | |
| 20000 | on | хомӯш | хомӯш | хомӯш | |
| 40000 | хомӯш | хомӯш | хомӯш | хомӯш |
Тавсифи Маҳсулот
Муаррифии мукаммалтарин ронандаи қадами дуфазавии бастаи бо набзи идорашаванда, маҳсулоти инқилобие, ки технологияи пешқадамро бо иҷрои истисноӣ ва эътимоднокӣ муттаҳид мекунад. Ин ронандаи қадами пешрафта барои тағир додани тарзи идоракунии муҳаррикҳои дақиқ тарҳрезӣ шудааст ва самаранокӣ ва дақиқии беҳтаринро барои барномаҳои гуногун таъмин мекунад.
Яке аз хусусиятҳои асосии ин ронандаи оличаноби қадам системаи пӯшидаи он мебошад, ки назорати дақиқро таъмин мекунад ва талафоти қадамҳоро ҳатто дар шароити душвори корӣ бартараф мекунад. Бо механизми пешрафтаи назорати набзи худ, диск ҷойгиркунии дақиқ, кори ҳамвор ва ларзишро кам карда, иҷрои аъло ва устувориро кафолат медиҳад.
Драйвери қадами дуфазавии бастаи бо набзи идорашаванда низ тарҳи мустаҳкам ва паймон дорад ва технологияи навтарини микропросессорро дар бар мегирад. Ин ба он имкон медиҳад, ки истеҳсоли моменти баландтарро ба даст орад ва бори вазнинтарро идора кунад, ки онро барои автоматизатсияи саноатӣ, робототехника, асбобҳои CNC ва дигар барномаҳои дақиқи дақиқ беҳтарин месозад. Алгоритми идоракунии мотори баландсифати он назорати дақиқи ҳаракатро таъмин мекунад ва онро барои вазифаҳое, ки ҳаракати мураккабро талаб мекунанд, интихоби олӣ месозад.
Диск инчунин бо худтанзимкунии оқилона муҷаҳҳаз шудааст, ки ҳама гуна хатогиҳо ё инҳирофҳоро ба таври худкор муайян ва ислоҳ мекунад. Ин иҷрои пайвастаро таъмин мекунад ва эҳтиёҷоти танзими дастӣ ё калибрченкуниро кам карда, вақт ва кӯшиши корбаронро сарфа мекунад.
Илова бар ин, драйвҳои қадами дуфазавии пӯшидаи бо импулс идорашаванда хеле гуногунҷабҳа мебошанд ва бо намудҳои гуногуни мотор, аз ҷумла муҳаррикҳои қадами биполярӣ ва якқутбӣ мувофиқанд. Интерфейси оддии пайвастшавӣ ва панели идоракунии барои корбар дӯстона ҳамгироӣ ва бефосила кор карданро бо системаҳои мавҷуда осон карда, вақт ва мураккабии насбкуниро кам мекунад.
Хулоса, ронандаи даврии дуфазаи пӯшидаи пулсӣ як маҳсулотест, ки бозиро тағир медиҳад, ки навоварӣ, дақиқ ва эътимодро дар як дастгоҳи пурқувват муттаҳид мекунад. Хусусиятҳои беназири он ба монанди назорати даври пӯшида, механизмҳои пешрафтаи назорати набз, қобилиятҳои худтанзимкунӣ ва универсалӣ онро барои барномаҳое, ки дақиқ ва самаранокии баландтаринро талаб мекунанд, беҳтарин мегардонанд. Бо ин маҳсулоти истисноӣ ояндаи идоракунии муҳаррики қадамро эҳсос кунед ва сатҳҳои нави фаъолият ва маҳсулнокро кушоед.
-
 Дастури истифодабарандаи Rtelligent T86-ро таҳрир кунед
Дастури истифодабарандаи Rtelligent T86-ро таҳрир кунед